Equilibrio
L’equilibrio di un SD si definisce tale quando, il sistema sottoposto a un u(t) costante e partendo da un preciso stato o (a seconda del caso Tempo Discreto o Tempo Continuo) si avrà una funzione di stato costante.
Nel caso TC (tempo continuo):
significa che
Nel caso a TD:
significa che cioè ‘quello di adesso è uguale a quello di prima’
Lagrange x Movimento SD
Il movimento di un SD in TD:
Dove si dice movimento libero, cioè che non dipende dagli ingressi ma soltanto dallo stato iniziale.
Il movimento di un SD a TC:
*NB: A è una matrice e in modo analogo al caso a TD è il movimento libero.
Cos’é il movimento libero? Intuitivamente é l’evoluzione del sistema che non dipende dall’ingresso, ma é intrinseco nel sistema. Nei sistemi dinamici lineari il movimento è dato dalla somma algebrica del movimento libero e del movimento forzato.
Come calcolare ? Se é diagonalizzabile, calcoliamo la matrice diagonale e la matrice degli autovalori . Dopo di che vale la relazione : ricordando che l’inversa di una matrice 2x2 é lo scambio degli elementi sulla diagonale e il cambio di segno degli elementi sulla antidiagonale, il tutto diviso per il determinante della matrice.
integrale di matrice → integrale elemento per elemento
Stabilità degli equilibri:
- equilibrio stabile: equilibrio ”classico” .. ingressi costanti → uscite costanti
- equilibrio asintoticamente stabile: equilibrio ”più forte” , per , esempio semplice ma efficace è la pallina in fondo alla coppa con attrito, appena provi a spostarla tornerà al punto di equilibrio.
La stabilità è una proprietà del sistema e dipende da cioè dalla matrice A.
Se :
- converge a 0: AS
- converge a un numero: S
- diverge: I
In pratica:
Gli autovalori della matrice A:
- AS
- S o I
- I
Ancora più in pratica:
- Det(A) = 0 I
- Tr(A) > 0 I
- Coefficienti del polinomio caratteristico (secondo grado) concordi ma non nulli, condizione necessaria e sufficiente per AS
- Coefficineti del p. c. (terzo grado o di più) concordi ma non nulli, condizione necessaria per AS
Ancora ancora più in pratica:
Tabella di Routh:
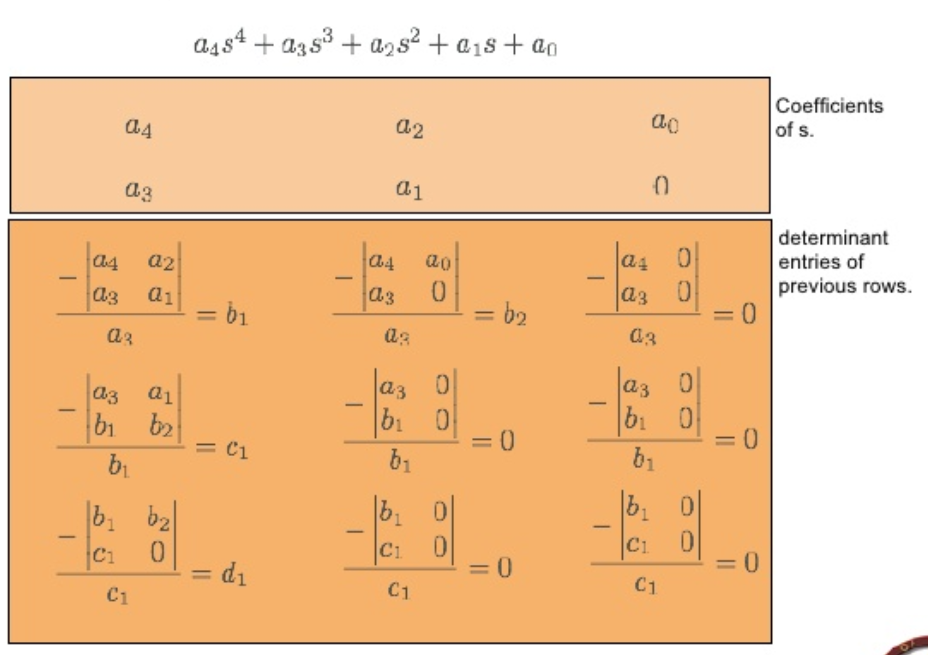 Ad ogni cambio di segno degli elementi della prima colonna corrisponde un autovalore positivo di A → quindi instabile.
Ad ogni cambio di segno degli elementi della prima colonna corrisponde un autovalore positivo di A → quindi instabile.
In pratica riassunto: usa la tabella di Routh per evitare la diagonalizzazione, guarda sempre la prima colonna, appena trovi un elemento con segno discorde dagli altri di fermi e dici che il SD in quel punto d’equilibrio è instabile
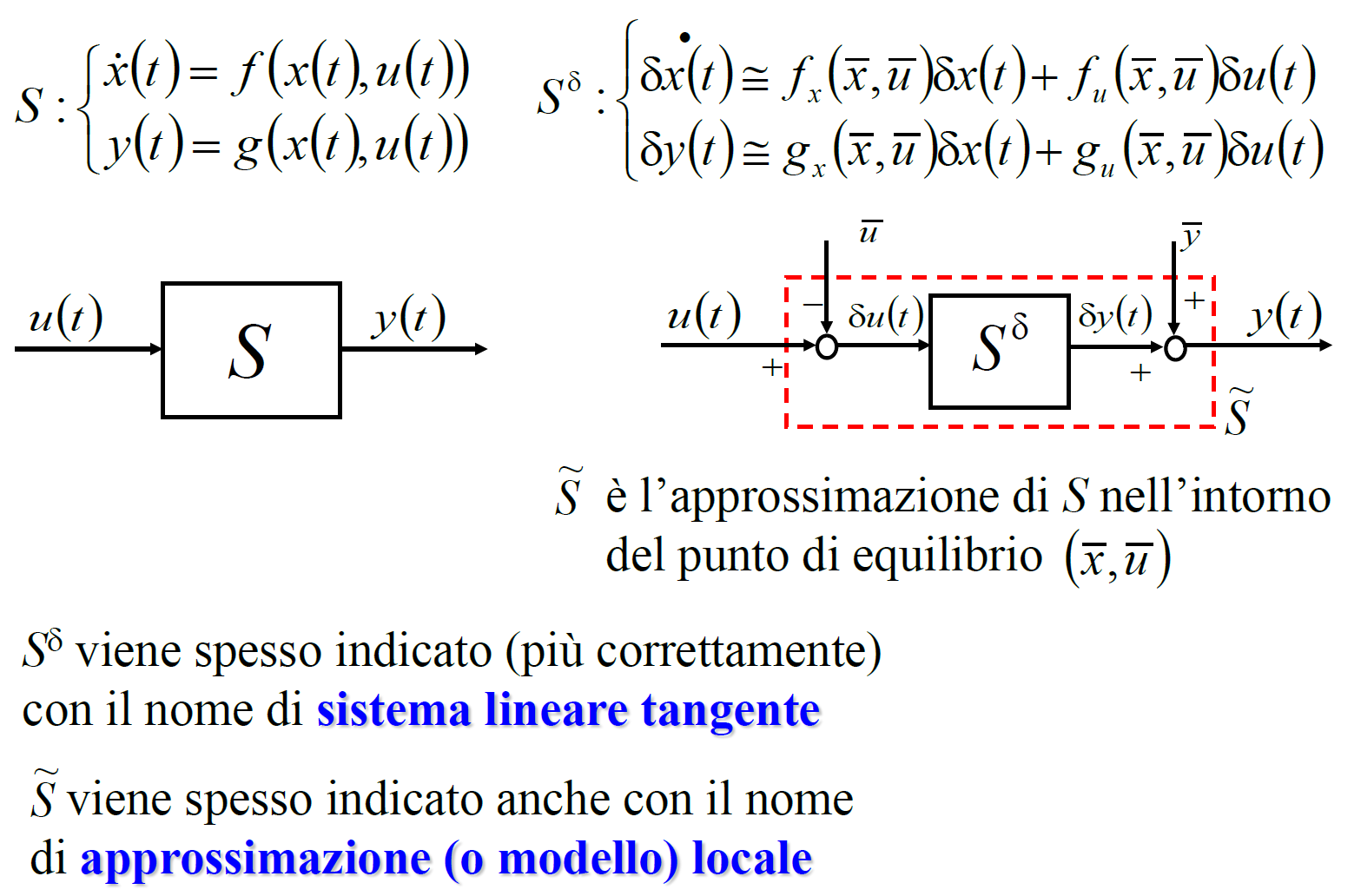
Linearizzazione
Intuitivamente in prossimitá di un equilibrio in un sistema dinamico (non lineare) la tangente é una valida approssimazione dell’intero sistema.
Segnali e Trasformate (Laplace e Fourier)
Sistemi dinamici nel dominio del tempo quando hanno equazioni differenziali sono sbatti da gestire.
Utilizziamo le trasformate per passare al dominio delle frequenze, nel quale i legami differenziali possono essere espressi come semplici legami algebrici.. semplificandoci quindi la vita.
trasformata di Fourier:
antitrasformata di Fourier:
trasformata di Laplace:
antitrasformata di Laplace:
dove s = k + jw ed è un numero complesso.
NB: nell’antitrasformata l’integrale è di linea! La trasformata di Fourier è un caso particolare di quella di Laplace. La TDF è quindi contenuta nella TDL, e se una funzione ammette TDF ammetterà sicuramente la TDL ma non viceversa!
Noi useremo principalmente quella di Laplace.
La quale gode di un paio di proprietà comode:
- operatore lineare
- proprietà della derivata
- proprietà integrale
- proprietà ritardo
Trasformate di Laplace usate spesso:
Ritardi da applicare alle antitrasformate
Capita negli esercizi vari che vengano applicati dei ritardi ai nostri segnali prima di antitrasformare. Ad esempio:
Teorema Valore Iniziale
Teorema Valore Finale
Funzione di trasferimento
La FDT di un SD è una funzione analitica nella variabile complessa .
Pigliamo un attimo il nostro SD e famo la trasformata di Laplace:
Se ‘risolvi’ il sistema ottieni:
Dunque, la FDT (funzione di trasferimento) del SD sarà:
la quale caratterizza il comportamento di un sistema, e descrive la relazione tra ingresso ed uscita.
Quindi e
Nel caso di un SD SISO la G(s) è sempre fratta con .
Possiamo utilzzare la trasformata di Heaviside, una particolare trasformata applicabile alla TDL razionali fratte, per tornare indietro nel regime temporale.
Ripasso di nomenclatura per chi non è del mestiere:
- radici di N(s) li chiameremo zeri
- radici di D(s) li chiameremo poli
Idea della trasformata di Heaviside è di riscrivere la G(s) come somma di addendi facili da trasformare con la . L’instabilità è una proprietà del sistema, certe volte un sistema diverge per qualsiasi ingresso, altre volte solo per determinati ingressi.
trovare stabilità = controlla gli autovalori di A, puoi anche non calcolarli e guardare i magheggi che abbiamo visto nei precedenti capitoli. In linea generale: autovalore con parte reale positiva implica instabilità nel caso di SD a tempo continuo. Nel caso di SD a tempo discreto autovalore con modulo implica instabilità.
Matrice di Jordan.
Sapevamo che con un autovalore con parte reale positiva si aveva l’instabilità. Ma con parte reale nulla?? Per uscirne da questo ultimo caso ci serve la Matrice di Jordan. Criterio basato sulla matrice di Jordan spiegato a mo’ di spaghettata: Nella matrice A possiamo localizzare dei ‘miniblocchi’ ovvero mini-matrici dentro le matrice. Queste minimatrici quadrate, individuate dal autovalori che hanno sulle diagonali devono essere limitate da 0. Se, con la regola appena descritta, le mini-matrici, cioè i miniblocchi di Jordan, hanno ordine 1 allora la matrice still rimane stabile. Altrimenti se anche un solo miniblocco ha ordine > 1, allora il sistema diverge a causa di termine che divergono polinomialmente. NB: per avere il sistema stabile serve che il più grande miniblocco del autovalore con abbia dimensione 1.
Raggiungibilità e Osservabili del sistema.
Teo. di Cayley-Hamilton = un discreto macello di dimostrazione che ci permette di ottenere un risultato importante. Come determino se un sistema è completamente raggiungibile? Il rango di questa matrice (quadrata nel caso SISO) deve essere il massimo, cioè non deve essere singolare, cioè non deve avere determinante nullo per essere completamente raggiungibile. Come determino se un sistema è completamente osservabile? Il rango di questa matrice deve essere massimo, il determinante non deve essere nullo, non deve essere singolare per essere completamente osservabile:
- se non vi sono cancellazioni mentre calcoli allora è R&O.
Si dice a fase minima un SD la cui fdt è quella che fra tutte le possibili funzioni di trasferimento con identica risposta in modulo introduce il minimo sfasamento possibile per ogni frequenza a cui essa è valutata. Da un punto di vista matematico ciò è dovuto al fatto che la funzione di trasferimento del sistema non abbia zeri oppure che abbia tutti i suoi zeri stabili, ossia di modulo strettamente minore di uno (nel caso di sistemi a tempo discreto) o con parte reale minore di zero (nel caso di sistemi a tempo continuo). minima Raggiungibile e osservabile. NOTA: Posso sempre passare da un SD a uno a fase minima cambiando il segno degli zeri e ‘ritardandolo’. Ogni sistema non fase minima infatti lo si può esprimere come uno a fase minima ‘ritardato’. Cioè un sistema a fase minima equivalente, in serie a uno sfasatore (che introduce il ritardo).
Nota che e la quaterna (A,b,c,d) sono rappresentazioni equivalenti di un (a meno di una trasformazione di similarità) sse nel calcolo di non vi sono cancellazioni, ovvero se il è R&O. Ricorda che la funzione di trasferimento però rappresenta solo il movimento forzato.
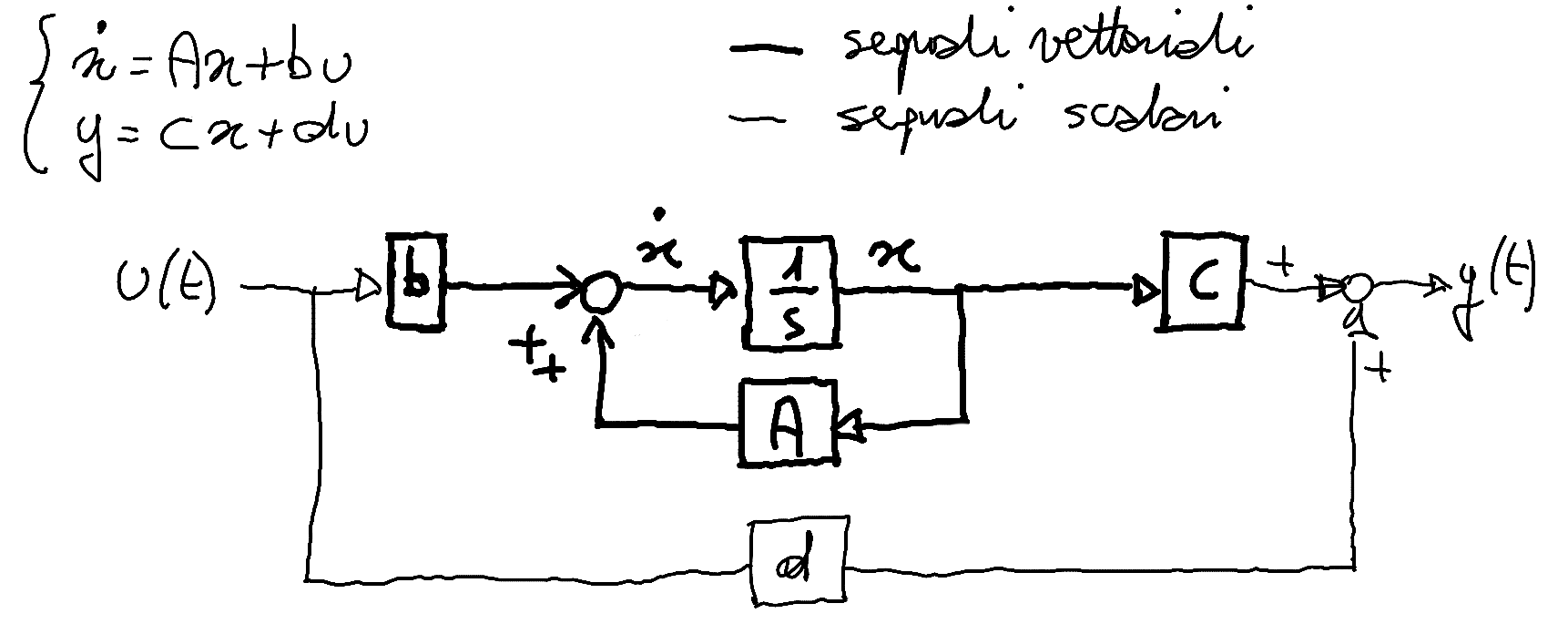
Schemi a blocchi.
Possiamo esprimere i SD come schemi a blocchi, nei quali ogni blocco rappresenta una e quindi un “sotto sistema dinamico”. Ogni blocco può essere poi suddiviso in ulteriori blocchi, i quali sono gli addendi che compongono la . NB: non c’è un prima o un dopo negli schemi a blocchi. Bisogna vedere il tutto come un’unica equazione e non pensare più in ottica temporale, ma in ottica di ‘segnali’.
Sistemi interconnessi
Uniremo solo blocchi R&O. Cioè uniremo solo SD con coprime tra loro (che non hanno fattori comuni tra numeratori e denominatori) e che sono minime e senza cancellazioni. Ci potremmo chiedere, e soprattutto ce lo potrebbe chiedere il prof, se data una rete di sistemi interconnessi, l’AS di singoli blocchi è sufficiente/necessaria per l’AS di tutta la rete. In generale, nel caso in cui volessimo assicurarci l’AS dell’intera rete è importante seguire queste regole:
- tutti i blocchi che NON sono in un anello devono necessariamente essere AS
- tutti i blocchi, il cui denominatore (della rispettiva ) appare come fattore nella complessiva, devono essere necessariamente AS
Infatti, per quanto riguarda gli anelli, le inizialmente coprime, potrebbero moltiplicandosi/addizionandosi tra loro avere dei fattori comuni e quindi portare a un sistema interconnesso non AS. DI conseguenza tutto ciò che è in un anello che sia AS o non AS non ci può dire nulla riguardo all’AS della rete complessiva. Al contrario, tutto ciò che è fuori da un anello condiziona l’AS complessiva.
Risposta esponenziale
con
ma non deve essere autovalore di A.
- Se è zero di allora ottengo y(t)=0 ( proprietà bloccante degli zeri)
- Se SD AS, allora
Risposta sinusoidale
con ma non devono essere autovalori di A.
- se AS, allora
Diagrammi di Bode
Studiare la risposta in frequenza significa studiare il comportamento del sistema al variare della pulsazione o della frequenza del segnale sinusoidale applicato in ingresso.
Lo studio della risposta in frequenza si riconduce all’analisi della variazione del modulo e della fase della al variare della pulsazione
Rappresentiamo la risposta in frequenza con due grafici, i quali rappresentano rispettivamente il modulo (o ampiezza) e la fase della funzione complessa di risposta in frequenza.
Contrariamente alla rappresentazione polare, la rappresentazione di modulo e fase della funzione di trasferimento avviene su due piani cartesiani diversi.
Basta applicare le regoline.
Regoline rilevanti:
- se g=0 parte da (guadagno(non nelle ipotesi di Bode)
- inclinazione iniziale data da
- poli buttano giú, zeri buttano su (tutto a botte di 20db/decade)
- diagramma della fase, parto da: e aggiungo se (guadagno) negativo.
- diagramma della fase, poli buttano su/giú in base al loro segno, cioé con botte di , mentre gli zeri buttano su/giú in base al inverso del loro segno, cioé con botte di
Margine di fase, di guadagno e di modulo
 {width=70%}
{width=70%}
- effetto del ritardo sul progetto: nel margine di fase sarà (i ritardi/sfasatori influenzano solo la fase e non il modulo, il serve per convertire i radianti della pulsazione () ).
- quando fai il conto del margine di fase non ci devi mettere il polo vero e proprio .. ma il suo inverso .. cioè ‘quello che vedi nell’equazione’
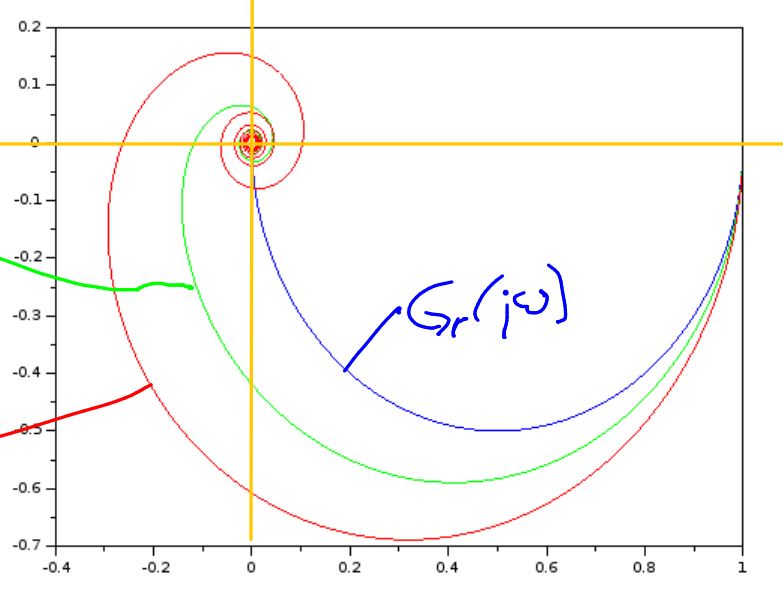
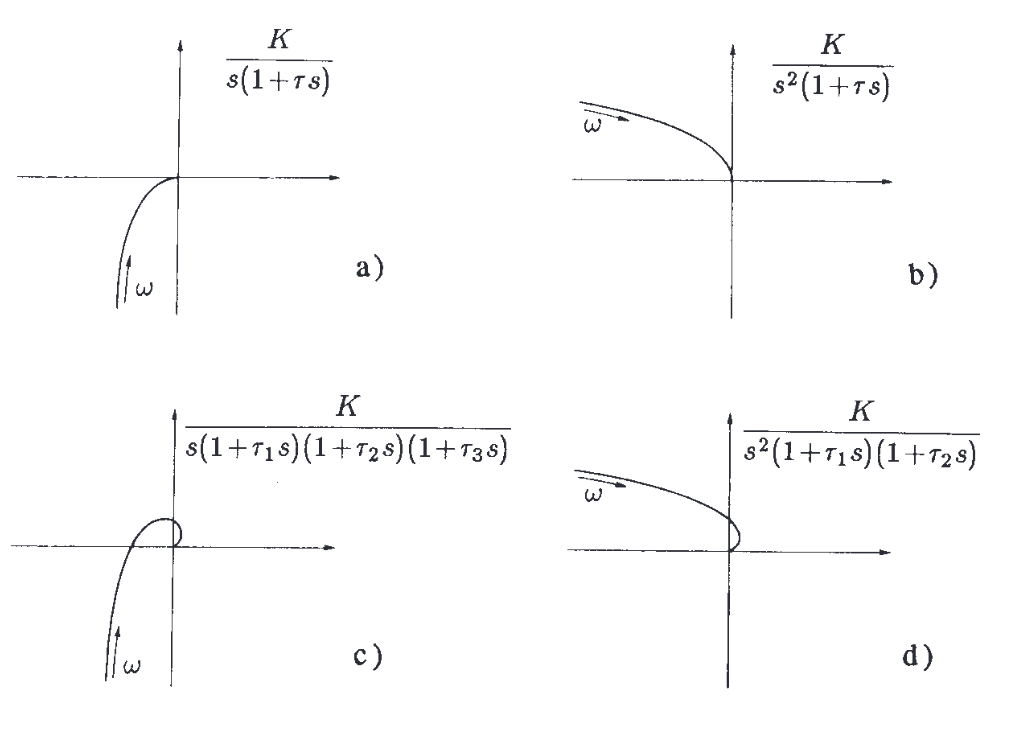
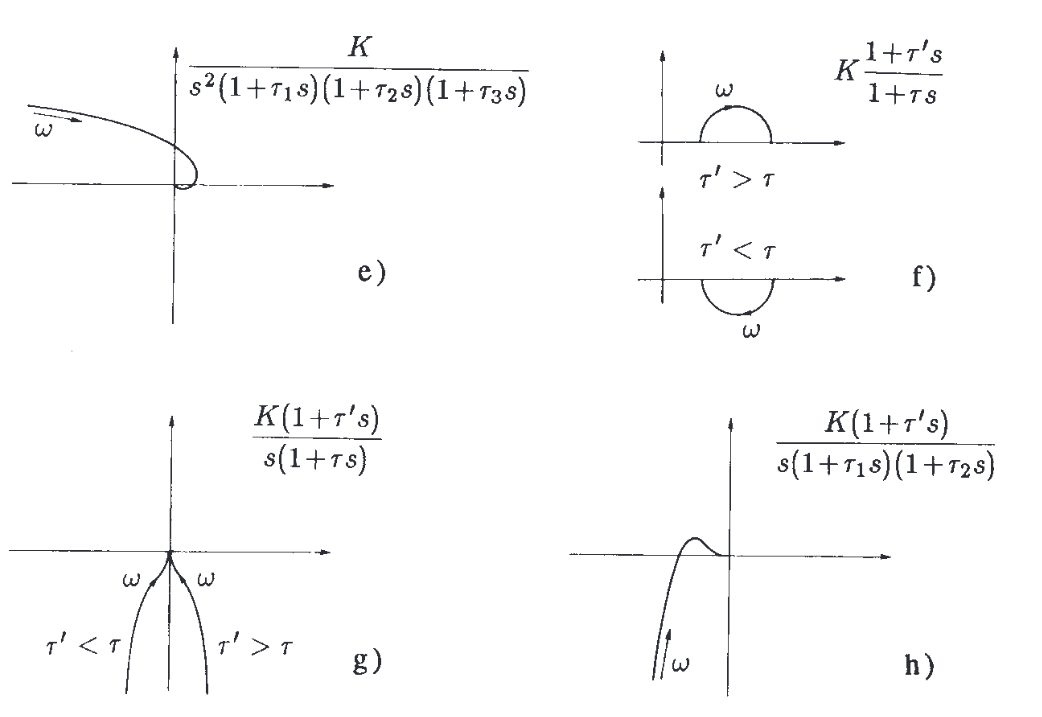
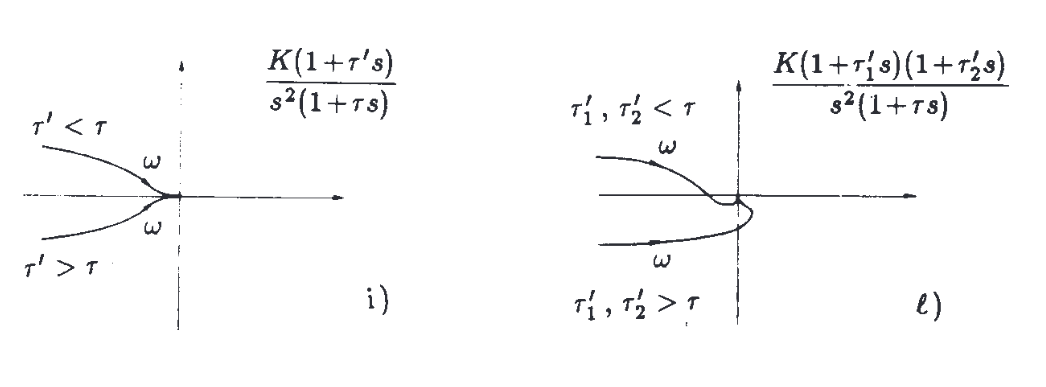
Diagramma Polare
La funzione di trasferimento di un sistema è una funzione analitica nella variabile complessa
che in regime sinusoidale diventa .
Per un generico valore di la funzione diventa, a sua volta, un numero complesso: Al variare di da zero a infinito, il vettore varia in modulo e direzione.
In questo modo può essere definito un luogo geometrico ( curva ) rappresentativo della posizione del vettore : questa curva è il diagramma di Nyquist della funzione di trasferimento.
I diagrammi di Nyquist sono dunque, rappresentati su un piano complesso ( piano di Gauss ) dove l’asse delle ascisse rappresenta l’insieme dei numeri reali, mentre quello delle ordinate rappresenta i numeri immaginari.In molte applicazioni, soprattutto in quelle per lo studio della stabilità di un sistema, non interessa la precisione con la quale viene tracciato il diagramma, ma la sua forma qualitativa in particolar modo l’andamento del diagramma per tendente a zero e a infinito.
 {width=70%}
{width=70%}
 {width=70%}
{width=70%}
 {width=70%}
{width=70%}
Criterio di Nyquist e di Bode
Il diagramma di Nyquist è il diagramma polare ‘specchiato verticalmente ed eventualmente con ‘l’infinito’ che si chiude a semicerchio.
 {width=40%}
{width=40%}
Criterio di Nyquist per SD Anello Chiuso
Definiti come il numero di poli con di L(S) e il numero di giri del diagramma di Nyquist attorno al punto contati se in senso orario e se in senso antiorario. Il SD ad anello chiuso sarà:
- AS sse (condizione necessaria e sufficiente)
- non AS se il diagramma passa per -1
Criterio di Bode
SE:
- il numero di poli con di
- Il diagramma di Bode taglia l’asse 0 dB una e una sola volta, dall’alto verso il basso
- Il margine di guadagno di L(s) è positivo allora il sistema è AS. Fondamentale per il progetto.