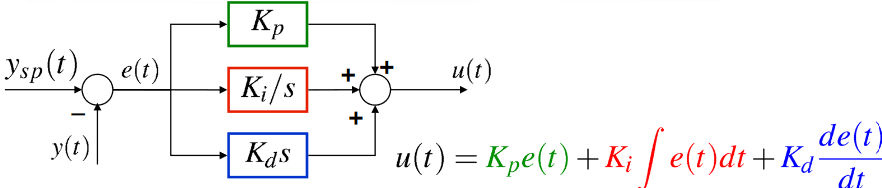
Regolatori industriali PID
Regolatori Proporzionali Integrali e Derivativi. Utilizzati largamente nell’industria.
Visione alternativa:
PID a controllo a 2 gradi di libertà
Legge PID in Forma Standard ISA reale a 2 gdl.
L’acronimo ISA sta per International Society of Automation .
Generalizzazione della legge di controllo del PID, frequentemente utilizzata nei regolatori commerciali, è detta forma pesata, con peso su set-point e
misura (rispettivamente e ).
Per b=1, c=1 si ottiene la forma standard del PID, da notare di come questi parametri moltiplichino soltanto e non .
Permette di ottenere funzioni di trasferimento diverse (e quindi
risposte diverse) tra ingresso di set-point e disturbo sull’uscita e
l’uscita stessa
Accenno taratura PI e PID
Si tratta sostanzialmente di progettare un controllore con dei vincoli sullo zero e guadagno (nel caso di PI) o sugli zeri e sul polo (nel caso PID).
-
PI: un polo nell’origine e uno zero.
Quando progetti un PI per cancellazione, è appunto scelto per cancellare il polo del processo da tarare. -
PID: due poli (di cui uno nell’origine) e uno zero.
Taratura peso
- Regole di Ziegler-Nichols
- IMC-PID
IMC - Internal Model Control
Si tratta sempre di tarare un regolatore ma ci basiamo sul modello interno del controllo.
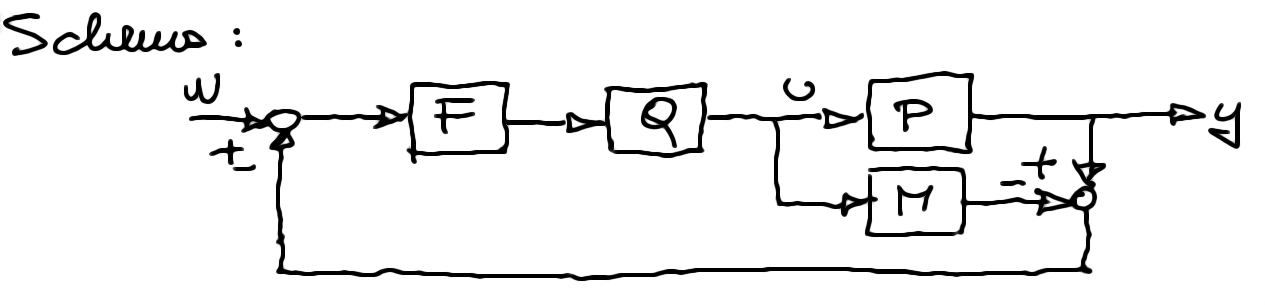
M è il modello del nostro processo.
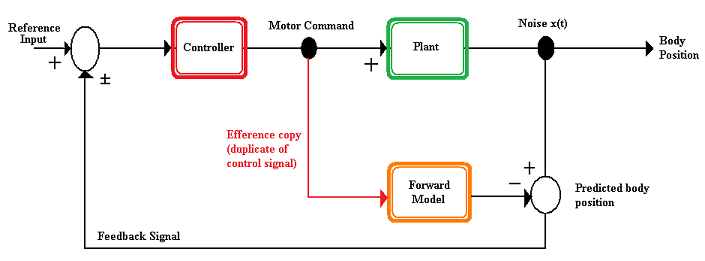
In pratica cerca di ‘predire’ il processo.
Sappiamo che poichè e non c’è quindi feedback. A questo punto cerco di porre . Se risulta realizzabile allora prendo come la dinamica voluta. (in genere data dal testo del esercizio), basta che sia realizzabile e che durante i calcoli non ci siano cancellazioni critiche (cioè vuol dire che eventuali zeri destri di rimangono).
Infine mi ricordo che
e sostituisco facendo il conto.
ADDENDUM:
Se c’è un ritardo dobbiamo cercare di approssimarlo:
- Approssimazione di Padè
- Padè (1,0) =
- Padè (1,1) =