Sistemi Discreti
Trasformata Zeta
Nel contesto della trasformata Zeta, la variabile complessa ha il significato operatoriale di anticipo di un passo. La trasformata Z è un operatore lineare. La proprietà più importante è quella del ‘ritardo unitario’: Può capitare negli esercizi in cui si fanno antitrasformate di Z ci sono ritardi anche di -2 -3 ecc. ecc. e per evitare di rendere i calcoli lunghi la consegna esplicita ‘condizioni iniziali nulle’ per eliminare il termine z*v(0)
Lista Trasformate di Zeta note:
Schema di Controllo
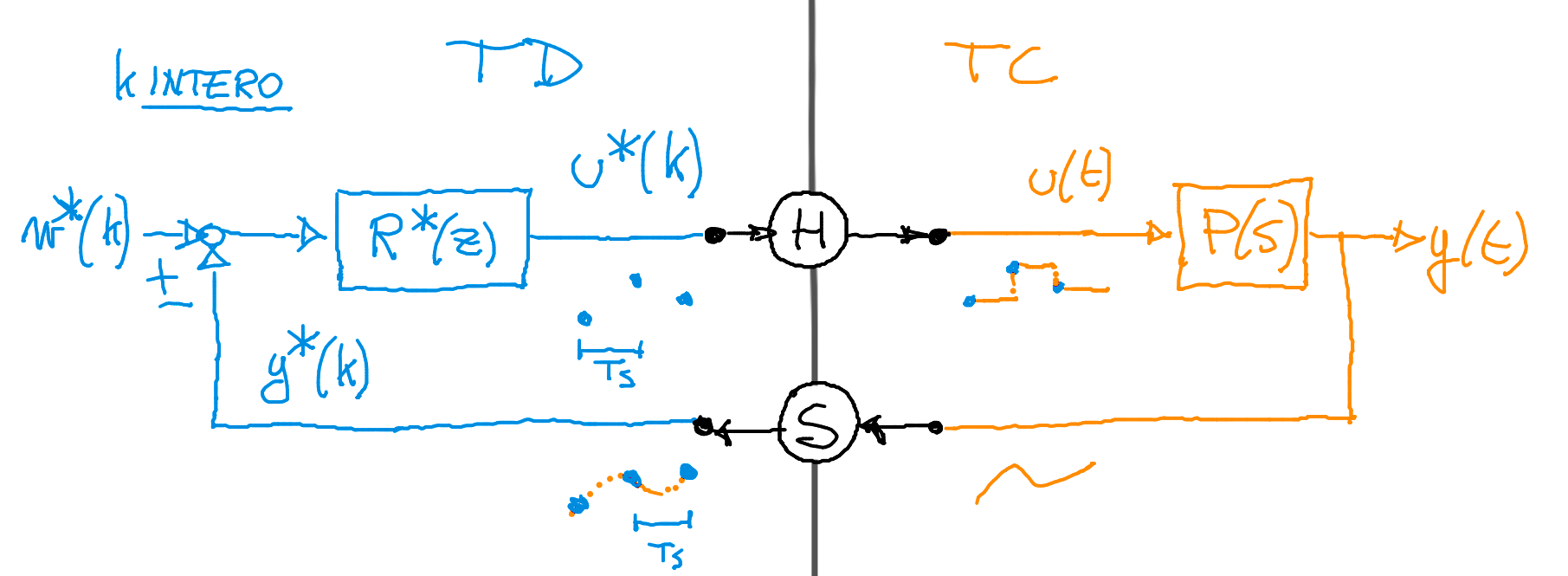
Discretizzazione per realizzazione digitale di SD a TC
Si tratta di sostituire una formuletta già fatta con il ricavato dalle formule di campionamento.
Discretizzazione esatta
Idea: far evolvere il sistema a TC per un tempo pari a . Cioè implica che se R(s) è AS lo è anche R(z).
Discretizzazione approssimata
é pesante da calcolare la discretizzazione esatta. Idea: approssimare la derivata temporale con il rapporto incrementale lungo un passo di campionamento
Metodo di Eulero Esplicito (differenze in avanti)
é un metodo di discretizzazione approssimata che può generare un SD a TD instabile partendo da un SD a TC che è AS.
Metodo di Eulero Implicito (differenze all’indietro)
Metodo di Tustin
windup = anomala sovraelongazione di un regolatore dinamico, non necessariamente integrale. Vincoli lo stato del regolatore quando si raggiunge la saturazione. Nota: con qualsiasi tipo di discretizzazione posso verificare la correttezza dei miei calcoli osservando che se R(s) ha un polo in 0 allora R(z) avrà un polo in 1. e il campionamento ? come lo si decide?
Campionamento
Il campionamento deve rispettare alcuni vincoli.
- vincolo proporzionale alla , es: ‘la ws deve essere almeno 20 volte la wc’
- vincolo sul modulo ,dal teorema del campionamento di Nyquist. ** = ** è la massima pulsazione rappresentabile senza aliasing con un campionamento a frequenza . Più è piccolo, meno aliasing. In pratica avrò una condizione sul modulo. Se ad esempio è -20dB cerco dove a tale modulo e trovo la . Il doppio sarà la minima .
- vincolo Sample and Holding: ((\frac{\pi}{180})\frac{1}{2}w_cT_s\leftarrow gradi detti dal testo non considerando il ritardo.
Tutti i vincoli sono dal basso di . Quindi tecnicamente potrei prendere una altissima o equivalentemente una bassissima.. ma nella realtà non è ottimo abbassare il tempo di campionamento maggiore calcolo computazionale mi serve una macchina più precisa.
Legge di controllo LTI a TD
Possono capitare esercizi di questo genere… sono molto semplici. , risolvi l’equazione e antitrasformi, scali Y(z+1) a Y(z) e così via, in modo da esplicitare tutto a Y(z) e valori ‘passati’, non futuri. Eventualmente se consegna lo chiede, sostituisci .